无人机智能巡检系统 人工智能基础软件开发的产品原型设计
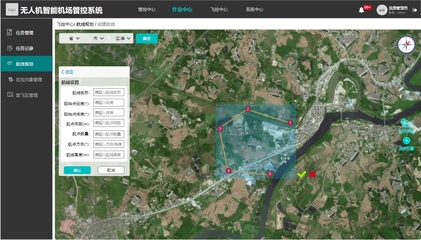
随着人工智能技术的飞速发展和工业自动化需求的日益增长,无人机智能巡检系统正逐步成为能源、交通、安防、农业等众多领域的关键基础设施。本产品原型聚焦于该系统的核心——人工智能基础软件开发,旨在构建一个高效、精准、可扩展的智能感知与决策平台。
一、 核心功能模块设计
- 智能感知与数据采集模块:
- 视觉感知:集成高精度摄像头与红外热成像仪,开发基于深度学习的图像识别算法,用于自动识别设备缺陷(如电力线路的绝缘子破损、螺栓缺失)、异常发热点、结构裂缝等。
- 环境感知:结合激光雷达(LiDAR)与多光谱传感器,开发点云处理与语义分割算法,实现三维场景重建、植被侵限分析、地形地貌变化监测。
- 自主路径规划与避障:开发融合实时环境感知信息的动态路径规划算法,确保无人机在复杂环境中安全、高效地完成预设或自适应巡检航线。
- 边缘计算与实时分析模块:
- 模型轻量化与部署:将训练好的大型AI模型进行压缩与优化,部署于无人机机载边缘计算单元,实现巡检数据的实时就地分析,大幅降低对通信带宽的依赖和响应延迟。
- 异常实时预警:开发流式数据处理管道,对识别出的异常目标进行即时分类、定位与严重性评估,并通过数据链向地面站发送分级告警信息。
- 云端智能管理与分析平台:
- 数据汇聚与资产管理:建立统一的云端数据库,存储所有历史巡检数据(图像、视频、点云、日志),并与被巡检的物理资产(如铁塔、风机、管道)数字孪生模型关联。
- 模型持续训练与优化:构建云端AI训练平台,利用不断积累的标注数据,对识别模型进行迭代优化与增量学习,提升系统的准确性与泛化能力。
- 宏观分析与决策支持:开发数据分析工具与可视化仪表盘,对全区域、长周期的巡检数据进行趋势分析、健康度评估和预测性维护建议生成。
二、 关键技术实现
- 算法选型与开发:
- 目标检测:采用YOLO系列、Faster R-CNN等先进算法进行缺陷与异常目标检测。
- 图像分割:运用U-Net、DeepLab等架构进行精细的像素级分割,用于裂缝测量、锈蚀区域量化。
- 点云处理:利用PointNet++、RandLA-Net等网络处理三维激光点云数据,实现自动分类与变化检测。
- 多模态融合:研究视觉、红外、激光雷达数据的融合算法,提升复杂场景下的感知鲁棒性。
- 软件架构设计:
- 采用微服务架构,将感知、规划、分析等服务解耦,提高系统的可维护性与可扩展性。
- 设计标准化的数据接口与通信协议,确保机载端、通信链路与云端平台之间的数据流畅交互。
- 引入容器化技术(如Docker)与编排工具(如Kubernetes),实现AI模型与服务的敏捷部署与管理。
三、 产品原型验证与迭代
- 仿真测试环境:构建高保真的数字孪生仿真环境,在虚拟场景中大量测试无人机的自主飞行逻辑与AI算法的识别性能,加速开发周期并降低初期实地测试成本与风险。
- 小范围实地试点:选择典型的应用场景(如光伏电站、输电线塔),部署原型系统进行实地飞行测试,收集真实环境下的算法性能数据与系统运行反馈。
- 闭环迭代优化:基于仿真与试点数据,形成“数据采集->模型训练->算法更新->部署验证”的快速迭代闭环,持续提升产品原型的成熟度与实用性。
四、 与展望
本产品原型通过系统性地整合计算机视觉、深度学习、边缘计算与云计算等人工智能基础软件技术,为无人机智能巡检构建了一个从实时感知到深度分析的完整技术栈。其成功开发将显著提升巡检作业的自动化水平、精准度和效率,降低人工成本与安全风险。随着算法的进一步精进和5G等通信技术的融合,该系统将向全自主化、协同化与预测性智能运维的更高阶段演进,成为工业物联网与智慧城市不可或缺的空中智能节点。